| |
Akció |
 |
|
|
| |
Termékek |
|
|
|
| |
Kapcsolat |
|
NON-STOP AZ ÖNÖK
SZOLGÁLATÁBAN
1145
Budapest Róna u. 127/A.
Tel: 0036-1-445-0435
email: info@reductor-motor.com
|
|
|
|
| |
Letöltések |
|
|
|
| |
Elmélet |
|
|
|
| |
Gyártócégek, márkák |
|
Varvel, Nord, Siti, Watt Drive, Bonfiglioli, Motovario, Spaggiari, Chiaravalli, CHT, Leeson, VEM, Baldor, Lenze, Hydro-mec, Lafert, ICME Motors, WEG, Teco, MGM, SEW, Transtecno, ATB, Bartec, A:O:Smith, Heidolph, Elin Ebg, Siemens, Leroy Somer, Bison, Marelli Motori, Orientalmotor, SPG, Faulhaber, Kelvin, Unimec, Crouzet, THK, Magnetic, Cemp, Carpanelli, Bühler |
|
|
|
|
|
| - DC motorok működései elve |
Többféle egyenáramú (DC) motor létezik , de a két fő típus a
kefe nélküli és a kefés típus.
A következő ábrán egy egyszerűsített vázlat látható a kefés DC
motor felépítéséről:
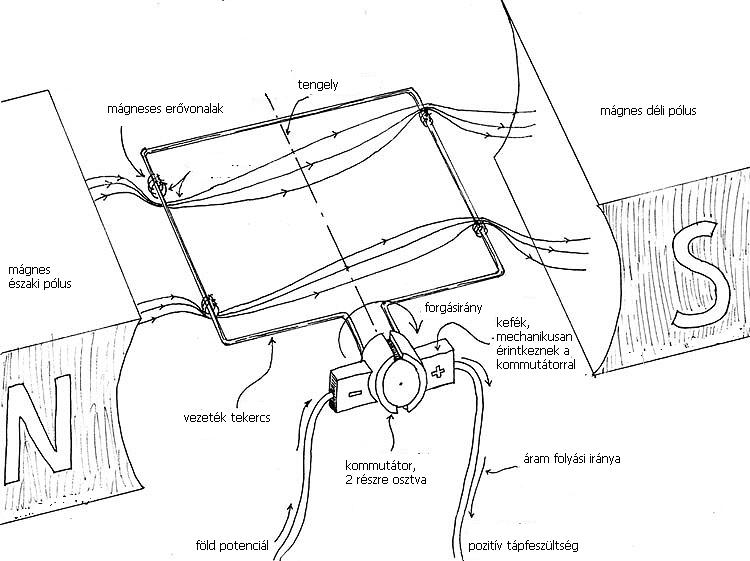 |
A motor álló része egy állandómágnesbol áll, amely a forgórész
(rotor) köré van elhelyezve. A rotor az ábrán jól látható (szaggatott vonal)
tengely körül képes elfordulni. A tengelyen helyezkedik el a tekercselés, mely a
tengelyvégen található kommutátor pólusokban végzodik. A kommutátor pólusok
rézötvözetbol készülnek, ezekhez mechanikusan csatlakozik a két darab szén, vagy
bronzkefe. A kefékre vezetett egyenáram a tekercsben mágneses teret hoz létre.
Ez a mágneses tér úgy metszi az állandómágnes mágneses terét, hogy az
elmozdulásra készteti a forgórészt. A polaritás megfordításával a forgás
iránya is megfordul. Egy valóságos motorban persze a kommutátor nem két részre
van osztva, hanem jóval több részre. A kommutátor osztás-párok egymással szemben
helyezkednek el és így a szénkefe mindig egy tekercspárt kapcsol feszültség alá.
A tekercs-párok úgy vannak elhelyezve, hogy mindig olyan elektromágneses tér
jöjjön létre, ami a tengelyt elmozdítani igyekeszik. Ha a tengely elfordul,
akkor már másik kommutátorosztás-pár kapcsolódik a szénkefékhez, ami ismét
elmozdítja a forgórészt.
Sebesség szabályozás
A motor láthatóan két kivezetéssel rendelkezik. A forgás
sebessége a kivezetésekre kapcsolt feszültség nagyságával változtatható. Ideális
esetben a feszültség-sebesség jelleggörbe lineáris, ami azt jelenti, hogy X
[Volt] feszültség változtatás mindig Y [RPM] forgási sebességváltozást eredményez.
Enkóder
Egy DC motor tengelyének kívánt pozícióba állításához szükség
van egy olyan eszközre, mely információt szolgáltat a tengely aktuális
pozíciójáról, ez az eszköz az iparban elterjedt enkóder.
Az enkóderek többféleképpen csoportosíthatók.
A szenzor típusa szerint kétféle enkóder típus terjedt
el:
Az optikai enkóder, ahogy a nevébol is következik fény
segítségével ismeri fel az adott pozíciót.
A mágneses enkóder pedig mágneses tér segítségével ismeri fel
a tengely pozícióját.
Alapvetoen a pozíció jelzés típusa szerint kétfajta enkóder
típus létezik:
- abszolút enkóder
- inkrementális enkóder
Az enkóderek lényegében egy tárcsából állnak, melyre különbözo
technológiákkal jeleket visznek fel. Abszólut enkóder esetén ezek a jelek
minden pozícióban egyediek és egyértelmuen azonosítják a pozíciót. Az abszolút enkóder egyértelmu elonye, hogy
minden pozíciót egyértelmuen azonosít, ezért például a vezérloberendezés
ki-bekapcsolása után is ismeri a tengely pozícióját. Hátránya a nagyon magas
eloállítási költség, hiszen a jelérzékelo, dekódoló berendezésnek igen komplex
elektronikai eszköznek kell lennie, általában több opto-kapu azonosít egy
pozíciót. Mágneses típusnál is hasonló a helyzet, csak ott a tárcsa speciális
mágneslemezbol áll.
Az inkrementális enkóderek nem képesek
azonosítani egyértelmuen, hogy éppen melyik pozícióban áll a tengely. A
vezérloberendezés bekapcsoláskor a tengely állapotáról semmit sem tud az enkóder.
Bekapcsoláskor a vezérloberendezés az aktuális pozíciót tekinti NULL pozíciónak.
Az encoder egy osztással való elmozdulása egy lépésnek számít. Nagy elonye
viszont az abszolút enkóderekkel szemben, hogy áruk kedvezo, a jelérzékelo,
feldolgozó egység megoldható 2 darab optokapuból és egy egyszeru dekódoló
áramkörrel.
|
|
|
|
|